O novo Experimento de reabastecimento robótico da NASA (RRM) é um dispositivo revolucionário de demonstração tecnológica - trazido para o alto pela missão final de transporte - que testará e provará se a espaçonave orbital existente da Terra que nunca pretendia ser reparada pode ser reabastecida e reparada com robótica com sucesso.
A carga útil do RRM é um experimento de última geração que promete abrir novas e emocionantes avenidas de pesquisas científicas em estações que potencialmente poderiam salvar e estender a vida útil de satélites comerciais, governamentais e militares em órbita, avaliados em bilhões de dólares.
O RRM foi entregue à Estação Espacial Internacional (ISS) pela equipe de quatro pessoas do STS-135, o grand finale dos ônibus espaciais. O projeto é um esforço conjunto entre a NASA e a Agência Espacial Canadense (CSA).
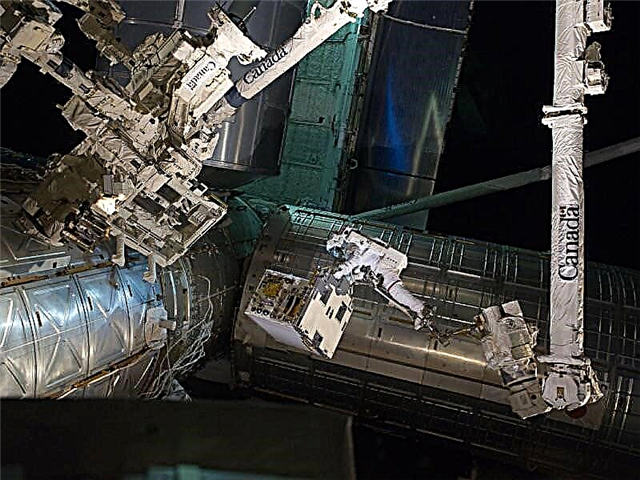
Durante a caminhada espacial final da Era do Ônibus Espacial, o RRM foi instalado temporariamente pelos astronautas americanos Mike Fossum e Ron Garan em uma plataforma no robô Dextre - o Manipulador Destreza para Finalidades Especiais - que funciona como um "trabalhador braçal" no espaço.
O Dextre é um robô de duas armas fornecido pela CSA, que também é um componente-chave do experimento, pois permite a execução de tarefas de reparo e manutenção no centro do experimento RRM.

A unidade do tamanho de uma máquina de lavar pesa 500 libras e foi colocada dentro do compartimento de carga do Space Shuttle Atlantis e conectada ao LMC (Lightweight Multipurpose Carrier) para a viagem de ida ao espaço.
Após a partida do Atlantis, o RRM será transferido para um ponto de conexão permanente na treliça das estações e montado no Exterior Logistics Carrier 4 (ELC-4) do posto avançado em órbita de um milhão de libras.
O RRM é a primeira demonstração de tecnologia da NASA com o objetivo de testar a viabilidade de operações de manutenção em órbita em satélites que não foram construídos para serem trabalhados e mantidos após decolar para o espaço, de acordo com Justin Cassidy, gerente de hardware da NASA Goddard Spaceflight Centro em Greenbelt, Maryland.
A caixa RRM simulará o satélite a ser reparado e as técnicas de manutenção necessárias para realizar o trabalho de reabastecimento e reparo robótico.

"O robô Dextre manipulará quatro 'ferramentas' especialmente projetadas, armazenadas em compartimentos dentro do RRM", disse Cassidy em uma entrevista no Centro Espacial Kennedy.
Usando um modelo de RRM de alta fidelidade - apelidado de "Rosie" - em exibição no site de imprensa do Centro Espacial Kennedy, Cassidy falou comigo em detalhes sobre a missão e os objetivos do RRM.
As quatro ferramentas únicas de RRM têm herança nas missões de manutenção do Hubble e foram desenvolvidas na NASA Goddard; A ferramenta de manipulação de cortador de fio e manta, a ferramenta multifuncional, a ferramenta de remoção de tampa de segurança e a ferramenta de bico.
"A Dextre agarra as ferramentas e as move com as mãos para realizar tarefas de reabastecimento e manutenção em quadros de atividades e componentes de satélite simulados montados nas paredes externas do RRM", disse-me Cassidy. "Os painéis de atividades podem ser trocados no futuro para realizar novas experiências."

A atribuição do RRM marca o primeiro uso do Dextre além das tarefas de manutenção de rotina a bordo do ISS. De fato, o projeto de pesquisa que trabalha com RRM é na verdade uma nova função de P&D além do que foi originalmente planejado e previsto para Dextre, disse Mathieu Caron, gerente de operações da missão da CSA.
As tarefas planejadas para o RRM incluem trabalhar e manipular tampas, válvulas e parafusos de formas e tamanhos variados, cortar fios, ajustar mantas térmicas e transferir fluidos em torno dos reservatórios de combustível. O etanol será usado para simular o fluxo de combustível de hidrazina, disse Cassidy.
"O RRM será operado por controladores no solo da NASA Goddard, o Marshall Space Flight Center em Huntsville, Alabama, e também no Canadá pela Agência Espacial Canadense", explicou Cassidy.
Cada ferramenta RRM é equipada com câmeras integradas, com seis LEDs embutidos para ajudar os controladores de solo a guiar com precisão as ferramentas.
"A fase experimental do RRM para demonstrar operações de reabastecimento e manutenção robótica na ISS está prevista para durar dois anos e pode continuar por talvez dez ou mais anos", disse Cassidy.
O presidente Obama perguntou à tripulação do STS-135 sobre o experimento RRM durante uma ligação do Escritório Oval da Casa Branca para a ISS. Assista ao telefonema de Obama no YouTube
A NASA espera que o pequeno investimento na demonstração da tecnologia RRM pavimente o caminho para missões avançadas de acompanhamento e desenvolvimento privado de veículos robóticos comerciais de reabastecimento e manutenção - em um futuro não muito distante - que colhem bilhões de dólares em economia e dividendos.





Leia meus recursos sobre a missão Final Shuttle, STS-135:
Recuperação de trombetas de saudação de canhão de água dos últimos lançadores de foguetes sólidos - Serviço de gravação
Shuttle Atlantis sobe ao espaço uma última vez: Álbum de Fotos
Atlantis é apresentado para voo final histórico em meio a tempestade
Contando até o último ônibus espacial; Tempestade projetada
Atlantis Crew Jets para a Flórida no Dia da Independência para a Final Shuttle Blastoff
NASA define 8 de julho para o Grand Finale de Ônibus Espacial Obrigatório
Final Shuttle Voyagers conduzem prática de contagem regressiva na plataforma de lançamento da Flórida
Carga útil final para o vôo final do ônibus espacial entregue na plataforma de lançamento
As últimas viagens de ônibus até a plataforma de lançamento; Galeria de fotos
Atlantis fica vertical pela última vez
Atlantis chega ao edifício de montagem de veículos com a tripulação final do ônibus espacial para a explosão de 8 de julho